PIN针是连接器中用来完成电(信号)的导电(传输)的一种金属物质。一般来说,PIN针在连接器中,最为明显的两个作用是完成电(信号)的导电(传输)。
检测需求:
LMI 3D视觉相机 Gocator 2520 激光线轮廓仪扫描、过滤、进行测量,并为在高速传送带上移动的pin针提供实时结果(通过/不合格)。如果没有全面准确的质量信息,很容易遗漏有缺陷的pin针,造成不可挽回的损失。
扫描速度:50mm/s
X方向点距:0.014mm
Y方向点距:0.014mm
选型:LMI 3D线激光轮廓传感器Gocator 2520
潜在的挑战
Pin针属于微小的、高反射性的物体,很难达到高精度扫描和测量,以满足几何公差。
在扫描数据过程中,会经常出现噪点。此外,某些pin针在电路板上焊接较深,这就要求传感器具有较好的角度兼容性,以便可靠地捕捉pin针的几何形状。
解决方案
LMI 3D视觉相机Gocator 2520传感器能够生成每个高反射针的高密度 3D 扫描(每个配置文件有1920 个数据点),用户能够使用最高分辨率的图像。工程师还可以选择使用 Gocator3D 视觉相机 或类似的传感器系统(线轮廓仪)来完全消除遮挡区域。传感器以下图方式架设,并沿固定方向多次扫描。
扫描后,Gocator3D 视觉相机提供内置过滤器来处理不同类型的数据噪点。借助 Gocator3D 视觉相机内置工具,还能够扫描和测量长度、高度、宽度和共面。
使用LMI 3D视觉相机Gocator 2520沿固定方向扫描样件,配置点云平面,表面转换、点云位置工具检测Pin针相对与基准平面的高度。以图2中R1-R4四个区域建立参考平面,图3为配置的点云位置工具用于检测Pin针高度,3个Pin针选择最高Z值特征,高度检测基准为参考平面,此时得到的高度值即为Pin针相对于基准的高度。
检测结果
使用LMI 3D视觉相机Gocator 2520 对Pin针样件进行扫面,并使用内置工具对扫描点云进行检测,点云位置工具可以输出高度Z值用于检测高度值,同时点云位置工具可以输出X、Y值,此测量值根据需要可以用于位置度检测。
Pin针上的噪点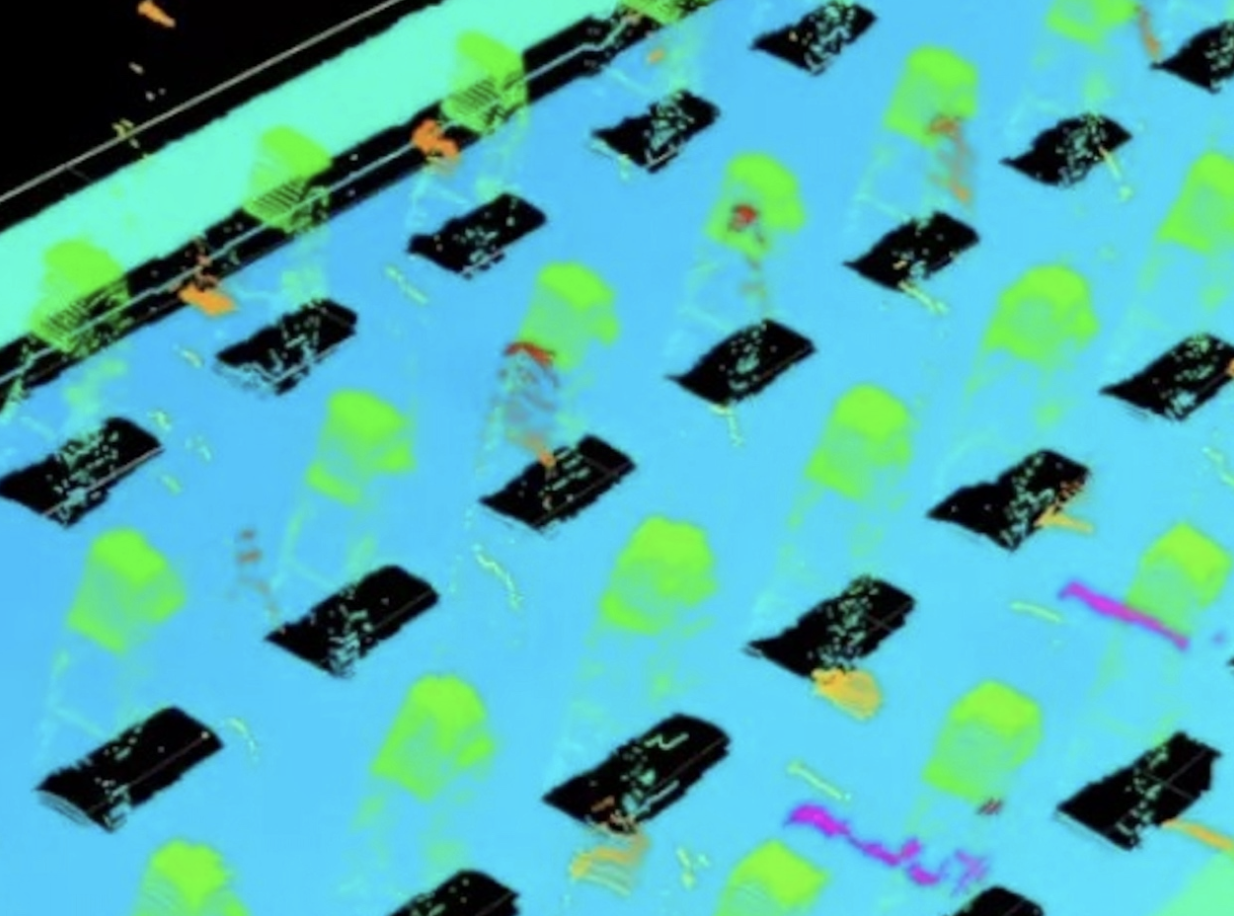
使用滤波后的图像,消除了噪点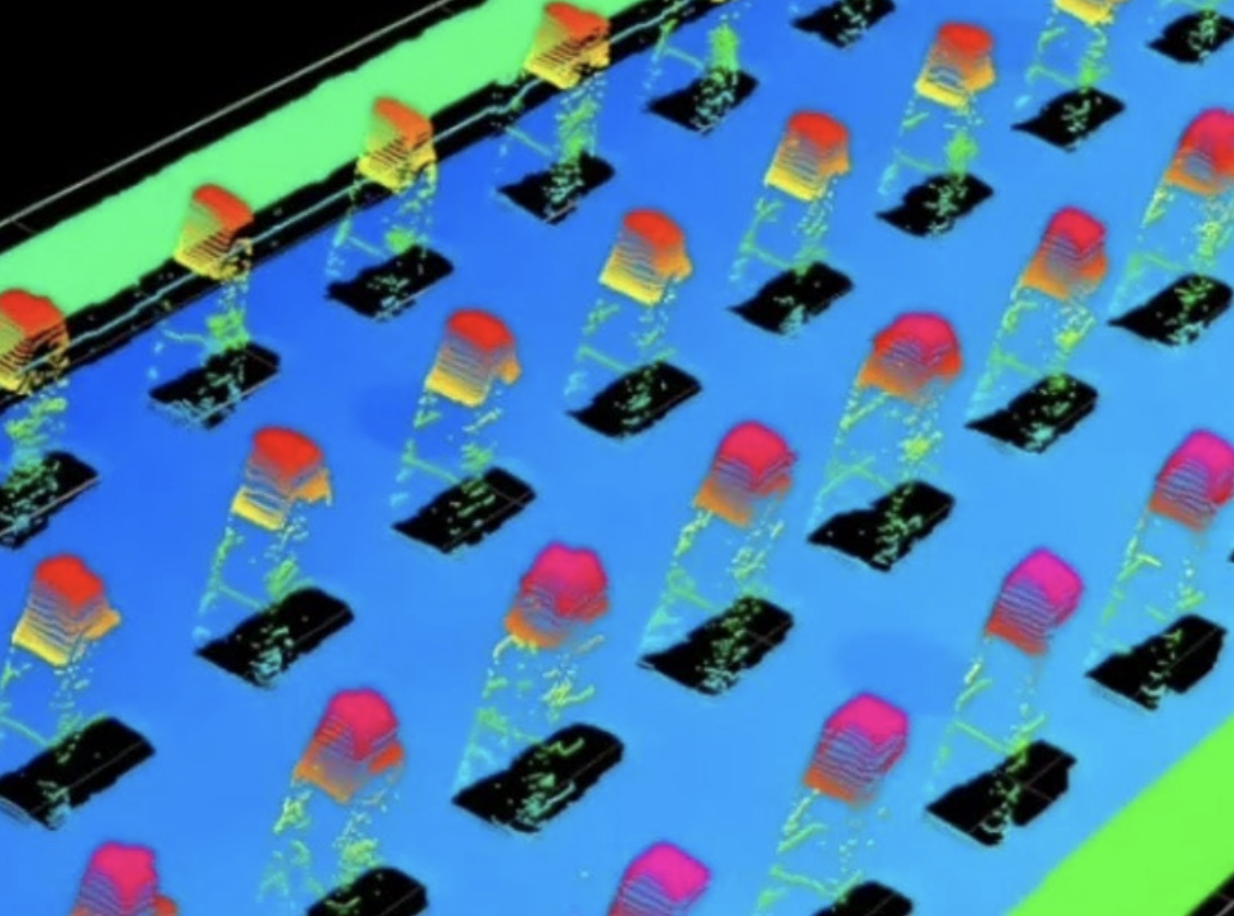 传感器扫描检测结果可以通过TCP通讯传递给上位机,支持的通讯协议包括:Gocator、Modbus等。
传感器扫描检测结果可以通过TCP通讯传递给上位机,支持的通讯协议包括:Gocator、Modbus等。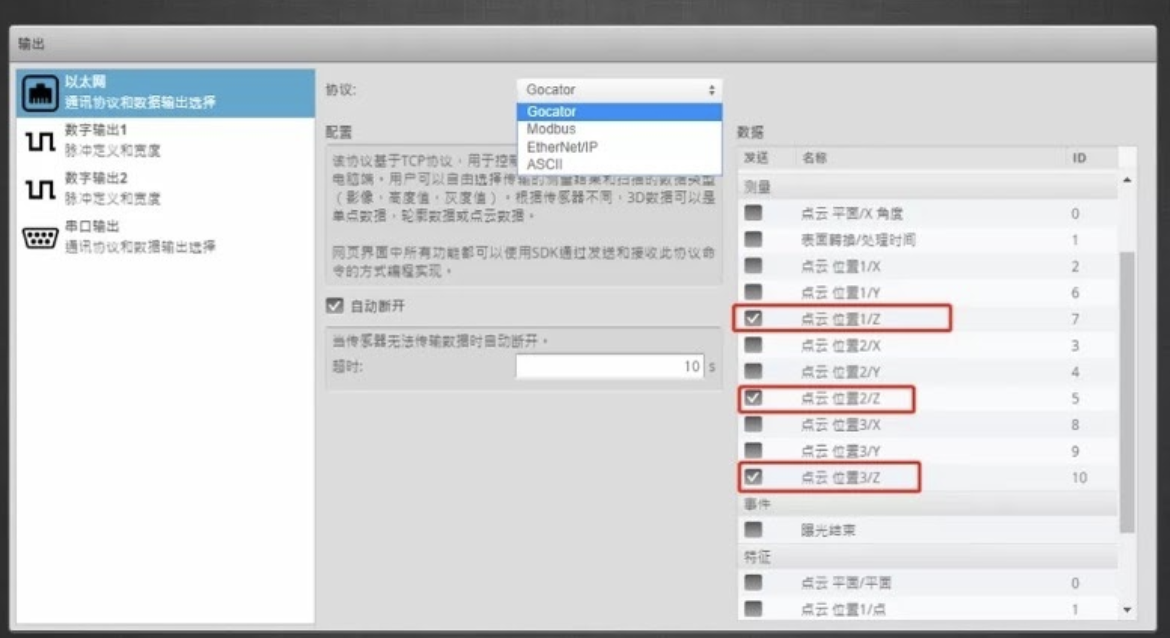
优势
沿着传送带移动,可适应不同部分的不同高度。
精确地测量pin针的高度。
确保 100% 高效检测,找出有缺陷的pin针。
以高达 10kHz 的速度,可提供完整的检查(扫描、测量、控制)。
大量节约成本。如果不能有效检测出有缺陷的pin针,可能会产生更高的成本,造成生产问题。
传感器参数
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。